
‹
›
‹
›
Cuota:
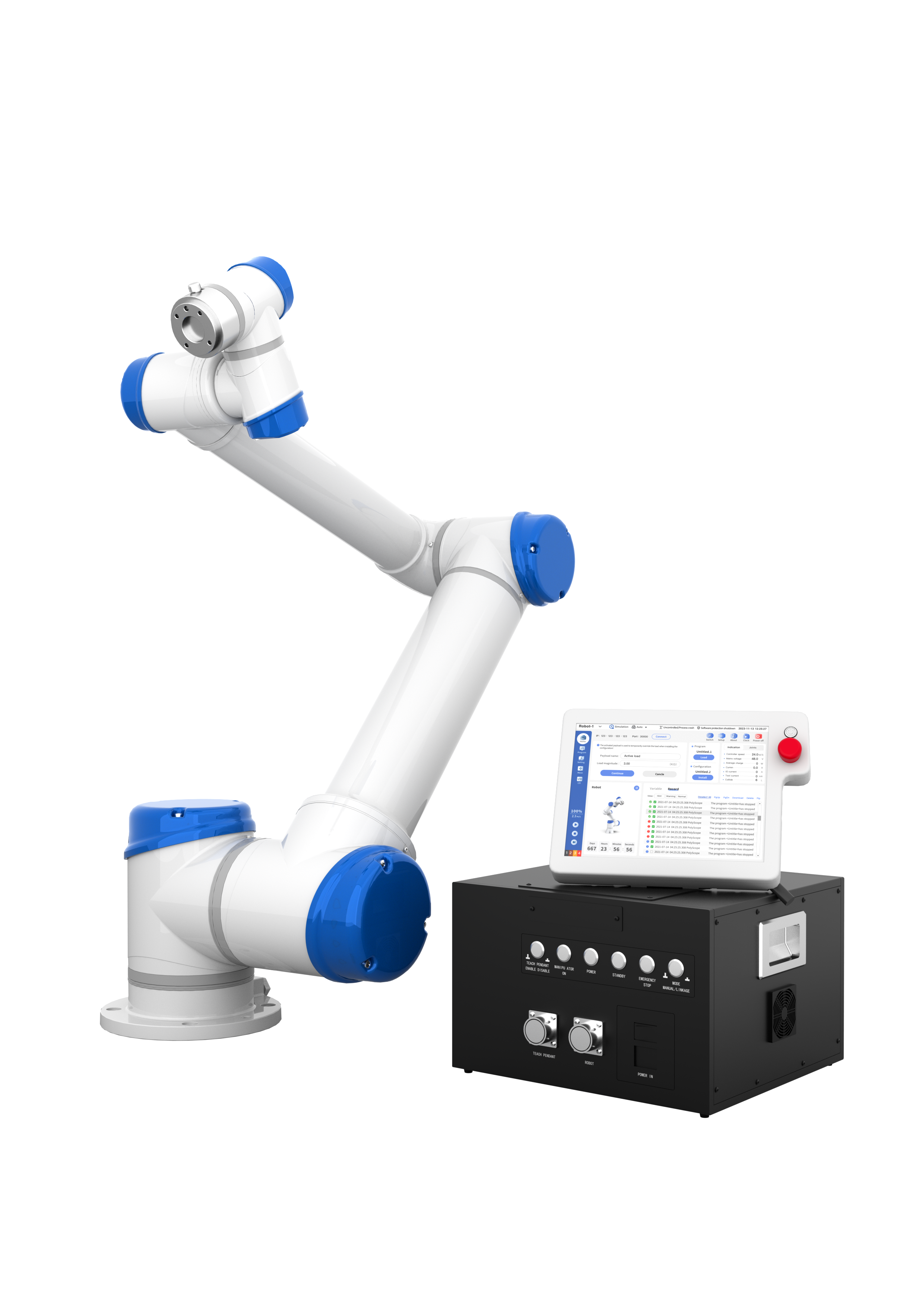
Fácil programación: terminal de operación con pantalla de 12,5"; se necesita media hora para dominar el método de programación y una hora para completar la programación sencilla.
Enseñanza mediante arrastrar y soltar: intuitiva y cómoda, localización rápida
Paquete de proceso de soldadura avanzado y múltiples tipos de oscilación: buena interconexión e intercomunicación con las máquinas de soldar y apariencia perfecta de las costuras de soldadura.
Plataforma de sistema abierto: compatible con múltiples métodos de comunicación, capaz de establecer comunicación con varios accesorios finales, seguimiento láser y otros equipos periféricos, conveniente para implementar en diversas condiciones y entornos de trabajo.
Respuesta de alta sensibilidad: admite detección de colisiones de 10 niveles y logra una cooperación hombre-máquina sin errores.
Tasa de rendimiento de producción enormemente mejorada: la precisión de la localización repetida puede alcanzar ± 0,02 mm; puede completar tareas de forma continua con requisitos de alta precisión durante mucho tiempo
15 minutos para completar el montaje: de tamaño pequeño, ligero y capaz de moverse.
Protección nivel IP54: adaptable a entornos severos


MENSAJE ONLINE
PRODUCTOS RELACIONADOS